
Jumbot-B: A 3D-Printed Bipedal Robot
By Zhenkai Gao & Xianmai (Chris) Liang
Course: ME 134 — Robotics Studio, Spring 2026, Tufts University
A 3D-printed bipedal robot built end-to-end: CAD, fabrication, electronics, and gait tuning. Jumbot-B walks at a best speed of 4 cm/sec using manually-tuned periodic gaits derived from servo encoder data.

Walking video → · Modular leg-swap demo → · All build & test footage (Drive folder) →
Overview
Jumbot-B is a small bipedal robot driven by eight servos and a Raspberry Pi, with chassis and feet 3D-printed in PLA. Each leg has hip pitch + hip yaw + hip roll plus a knee/leg joint — enough articulation to shift weight and twist the body during single-support phases of a gait.
We tuned gaits directly on the hardware using servo encoder feedback rather than running a simulation track.
Robot Specifications
| Spec | Value |
|---|---|
| Total weight | 15 lb |
| Height | 374 mm (~14.7 in) |
| Width | 230 mm (~9.1 in) |
| Length (depth) | 140 mm (~5.5 in) |
| Foot width | 122 mm |
| Walking speed (sustained max) | 0.5 in/sec (~1.27 cm/sec) |
| Walking speed (best) | 4 cm/sec |
| Walking terrain | Flat surface |
| Peak power draw | 9 V · 0.6 A · 5.4 W |
| Compute | Raspberry Pi 4 |
| Drive | 8 × LX-16A bus servos (position/velocity/temperature/voltage feedback) |
| Sensing | Onboard IMU + per-servo encoders |
| Material | PLA chassis & feet |
Robot Design & CAD
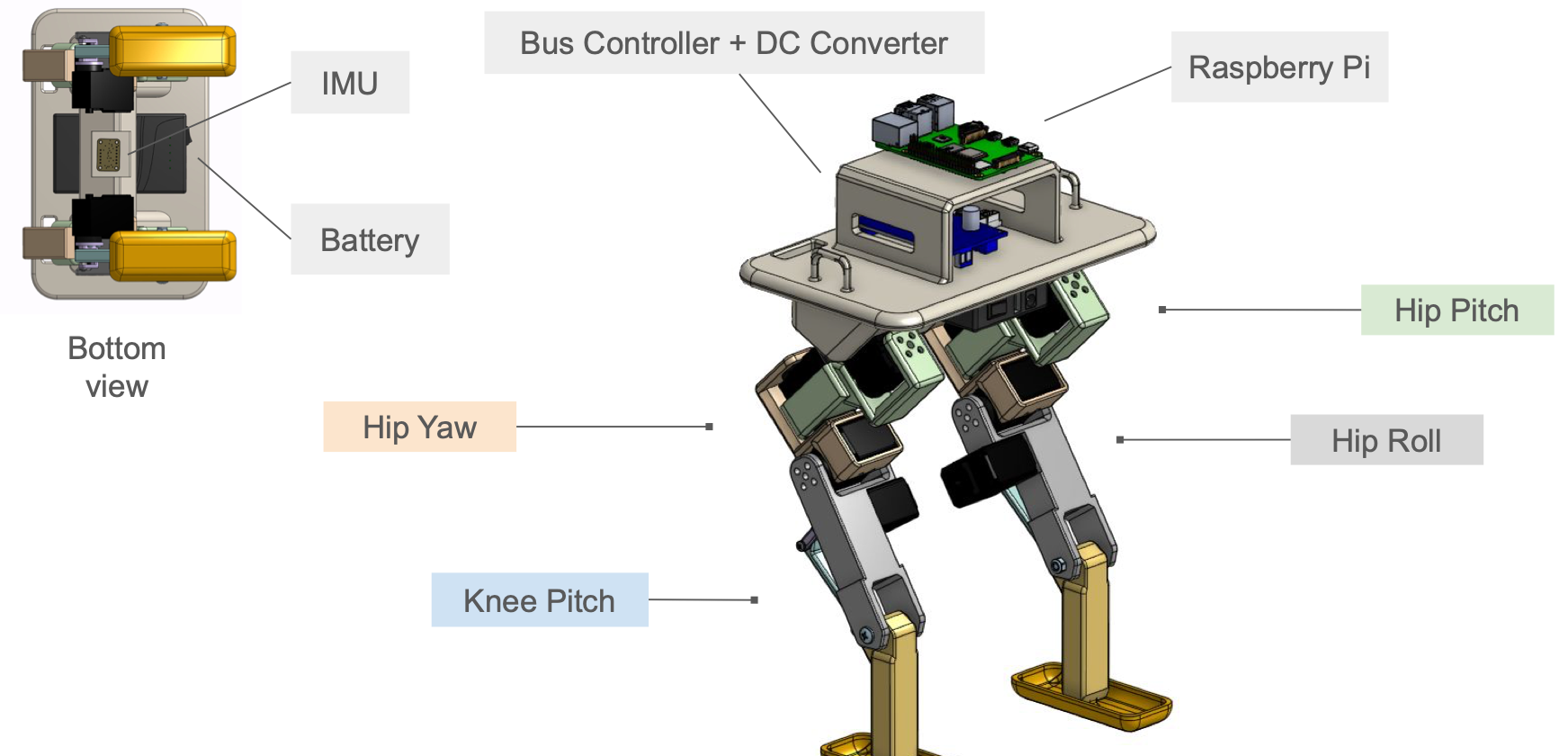 Key components: Raspberry Pi 4 compute on top, bus controller + DC converter on the platform, hip pitch / yaw / roll servos per leg, knee pitch servo, 3D-printed feet, and an IMU + battery on the underside.
Key components: Raspberry Pi 4 compute on top, bus controller + DC converter on the platform, hip pitch / yaw / roll servos per leg, knee pitch servo, 3D-printed feet, and an IMU + battery on the underside.
Key design choices:
- DOFs (per leg): hip pitch + hip yaw + hip roll + knee/leg.
- Materials: PLA for the chassis and feet — rigid, predictable contact dynamics.
- Sensing: each servo reports position, velocity, temperature, and bus voltage; an onboard IMU provides body-frame orientation; encoder data drives the gait tuning loop.
- Compute: a Raspberry Pi 4 runs the gait controller and commands the servos over a half-duplex bus.
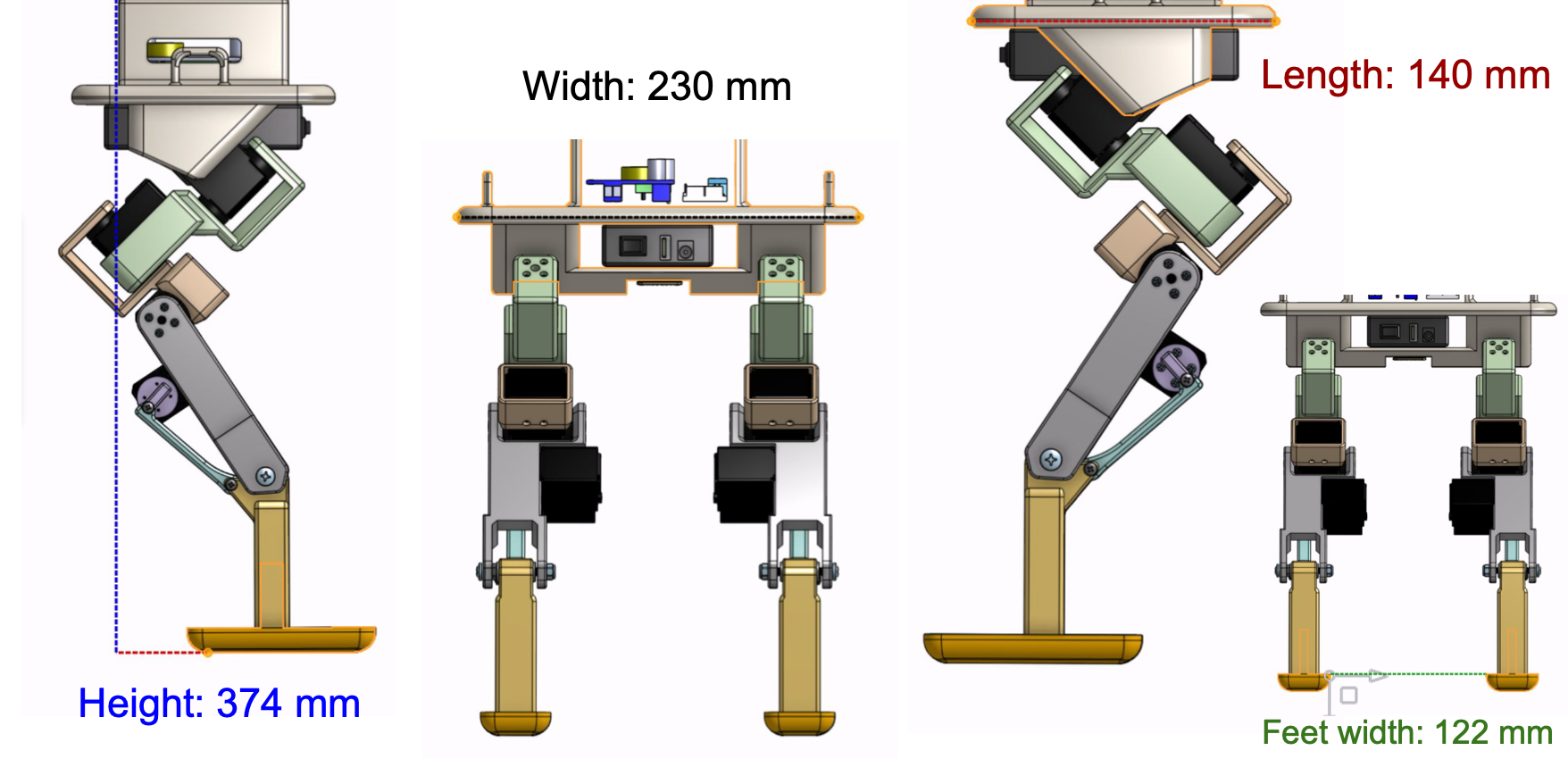 Main dimensions: 374 mm tall, 230 mm wide, 140 mm front-to-back, 122 mm foot stance.
Main dimensions: 374 mm tall, 230 mm wide, 140 mm front-to-back, 122 mm foot stance.
Multi-pose CAD Views
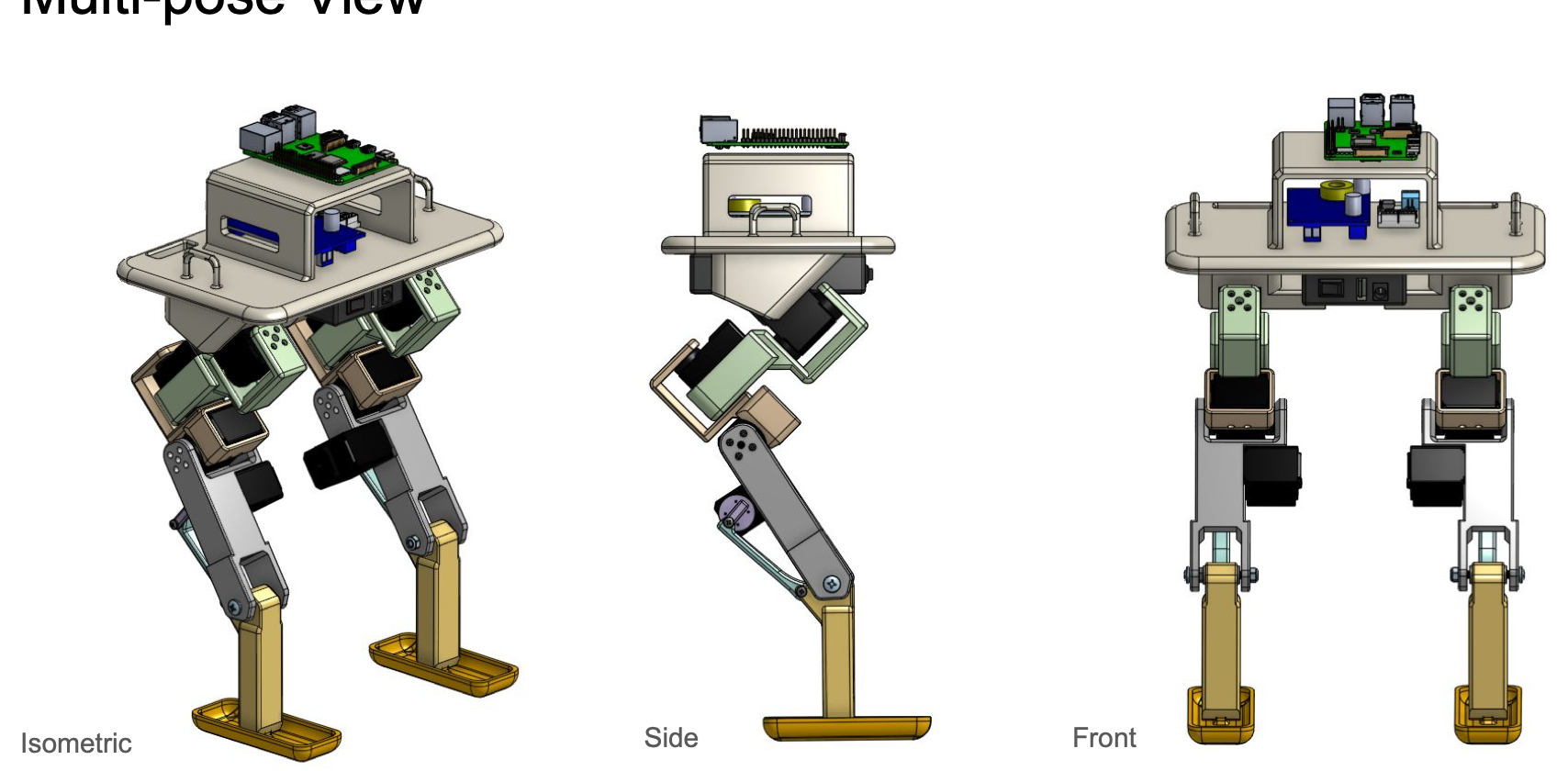 Isometric, side, and front views.
Isometric, side, and front views.
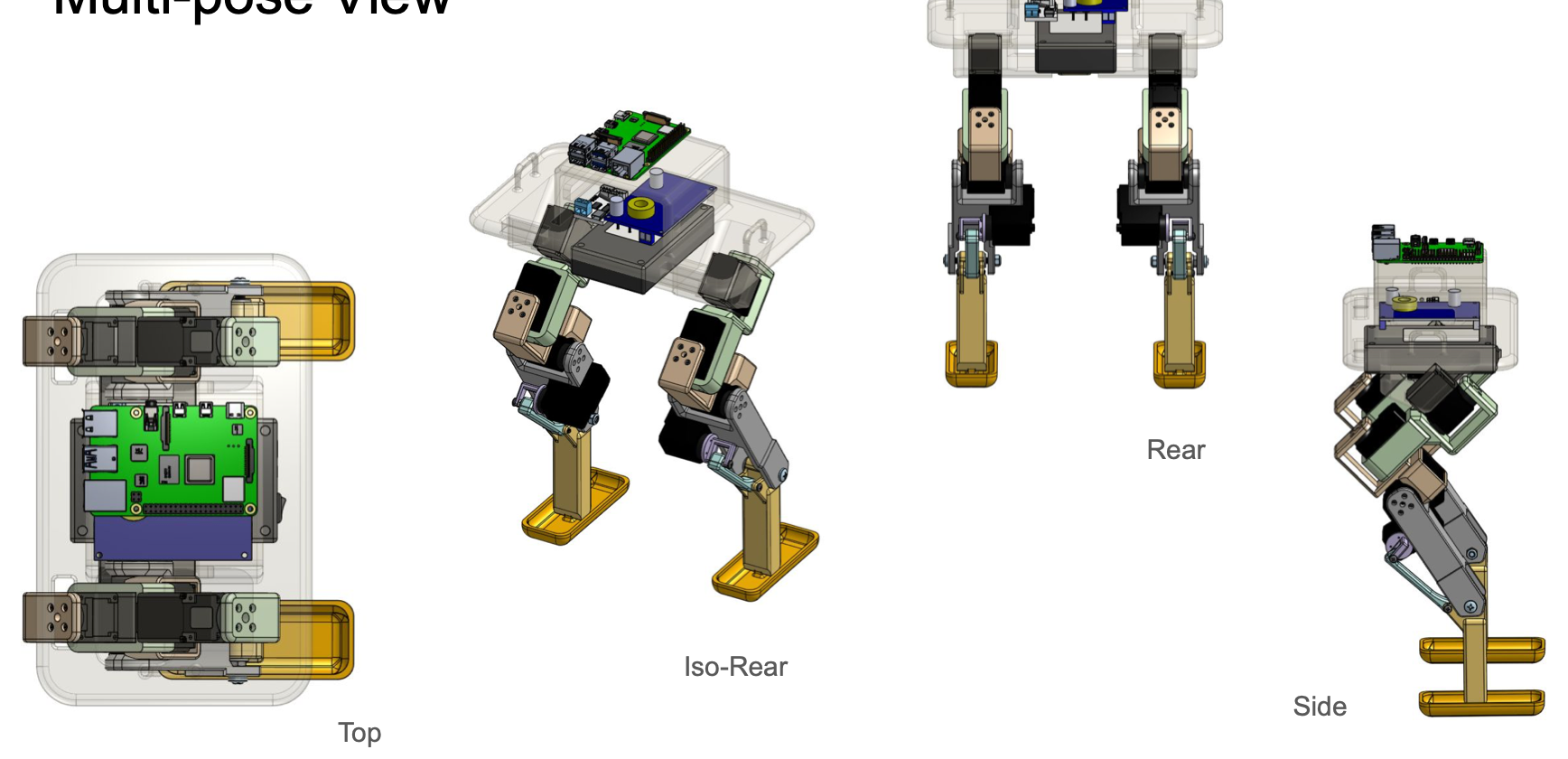 Top, iso-rear, rear, and side views — chassis shown semi-transparent so the internal electronics layout is visible.
Top, iso-rear, rear, and side views — chassis shown semi-transparent so the internal electronics layout is visible.
Mechanical Assembly
The robot was built outward from a single-leg prototype: Onshape CAD → 3D-printed parts (PLA, Prusa MK4S for v1.0 prototyping, Prusa Core One for v2.0 final parts) → support-structure removal → assembly → single-leg motion test → tandem-leg test → full bipedal robot.
Single-leg motion test video →
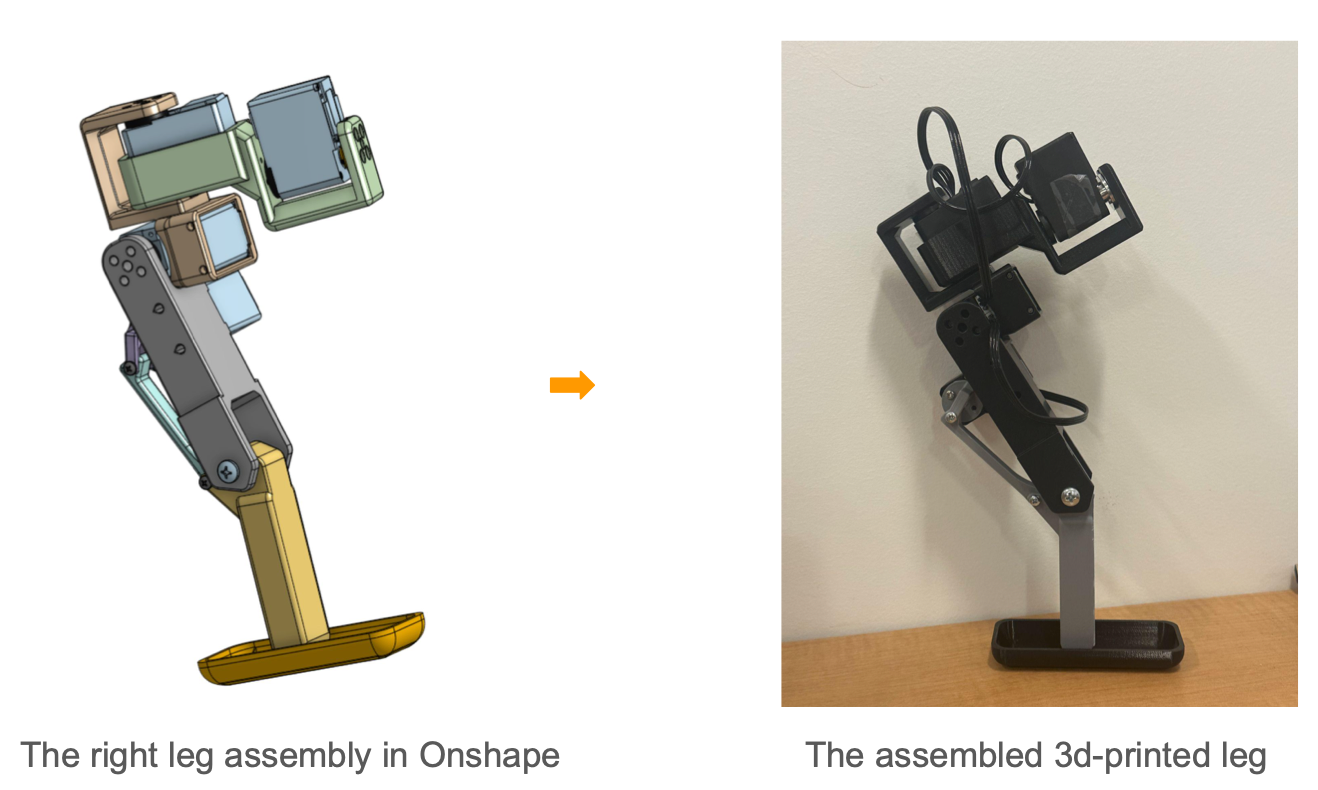 From CAD to real world — the right-leg assembly in Onshape (left) and the assembled 3D-printed leg with servos installed (right).
From CAD to real world — the right-leg assembly in Onshape (left) and the assembled 3D-printed leg with servos installed (right).
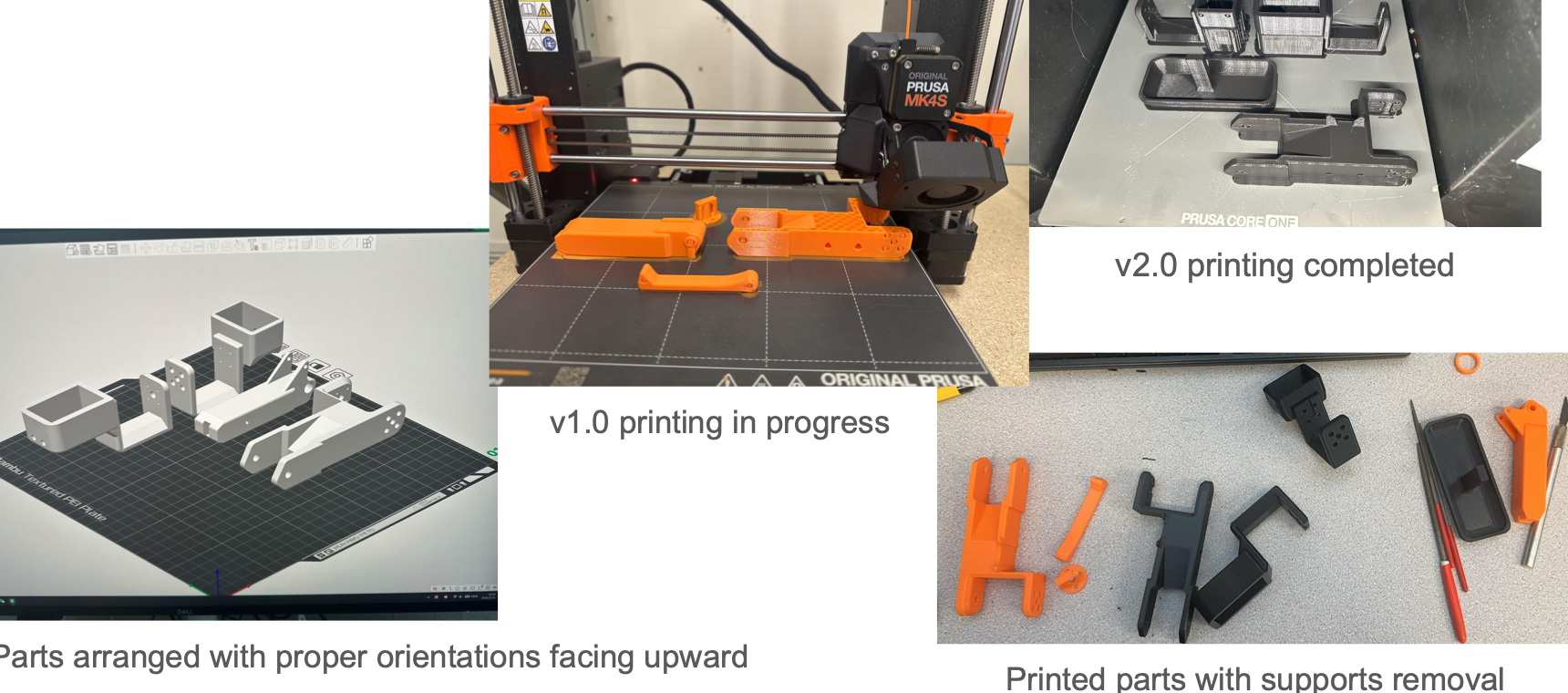 3D printing process — parts oriented in the slicer with overhangs facing up, v1.0 printing on a Prusa MK4S, v2.0 final parts on a Prusa Core One, and the printed parts with support structures cleaned off.
3D printing process — parts oriented in the slicer with overhangs facing up, v1.0 printing on a Prusa MK4S, v2.0 final parts on a Prusa Core One, and the printed parts with support structures cleaned off.
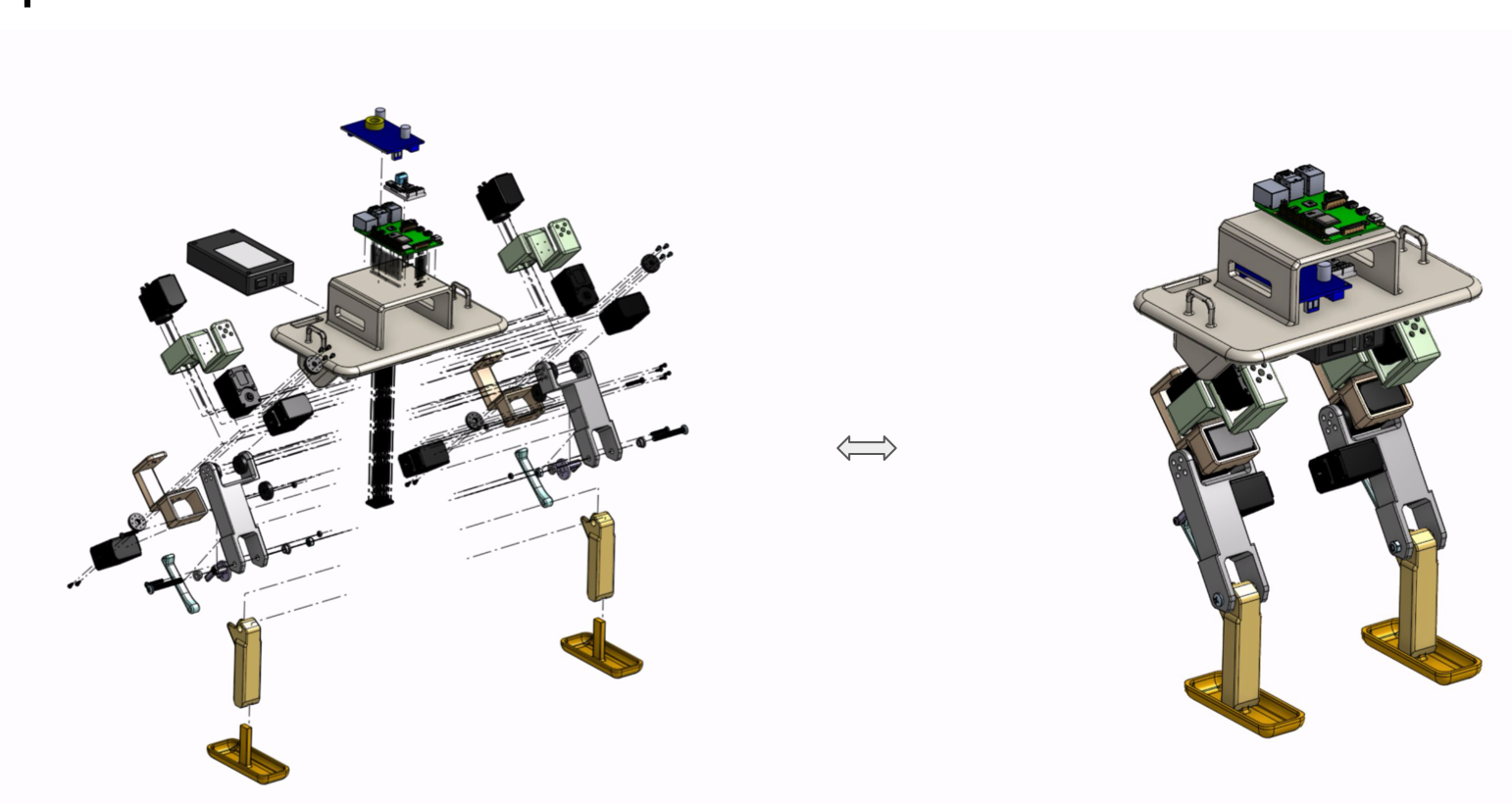 Exploded view of the full assembly — chassis plate, four servos per leg, linkage parts, hardware, and the foot module.
Exploded view of the full assembly — chassis plate, four servos per leg, linkage parts, hardware, and the foot module.
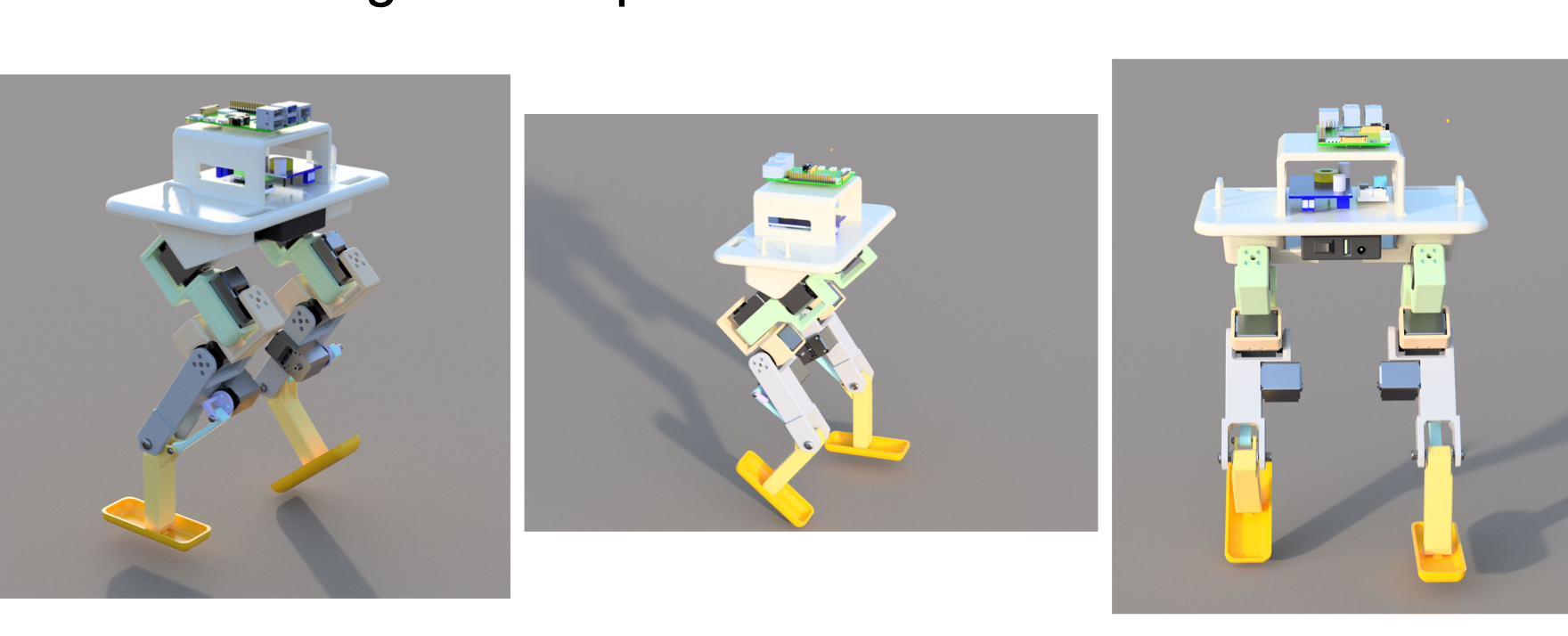 Three perspective renders of the assembled robot.
Three perspective renders of the assembled robot.
Assembled Robot Photos
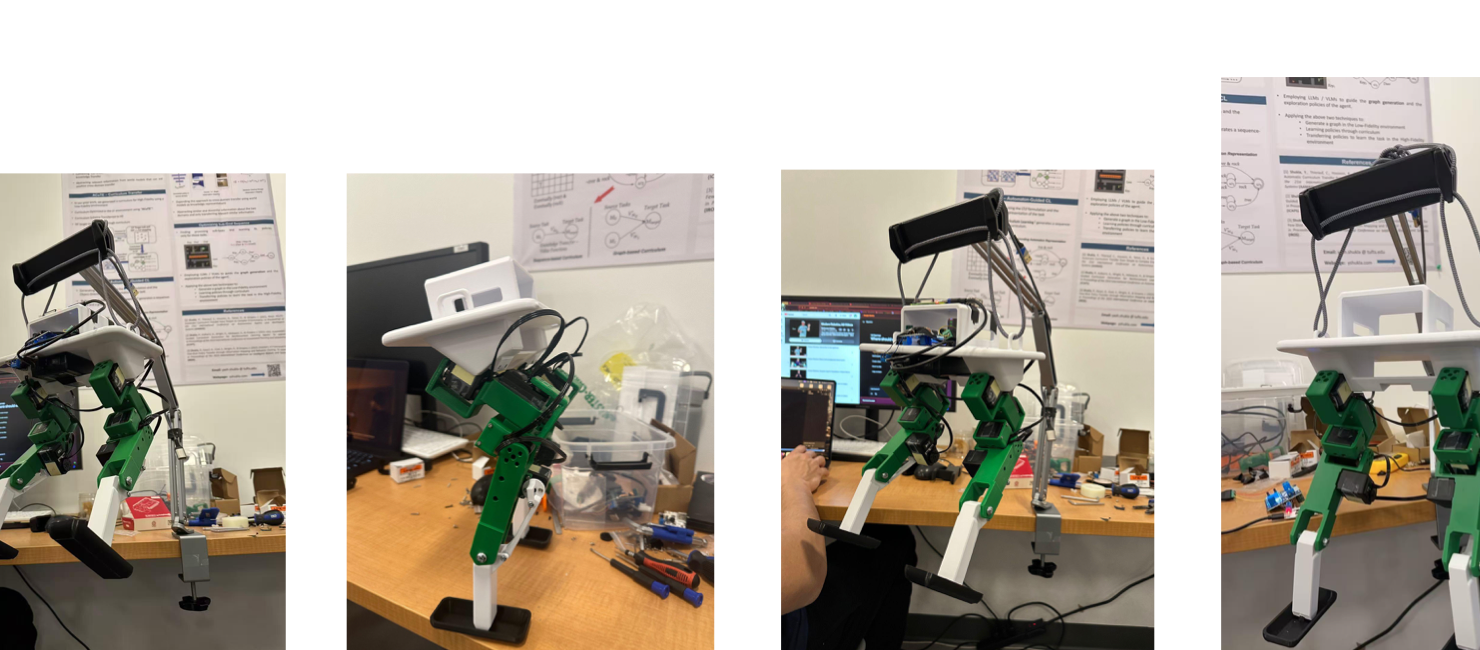 Painted/sanded final assembly on the bench — chassis bolted up, all 8 servos wired into the bus, cable bundle routed along the spine.
Painted/sanded final assembly on the bench — chassis bolted up, all 8 servos wired into the bus, cable bundle routed along the spine.
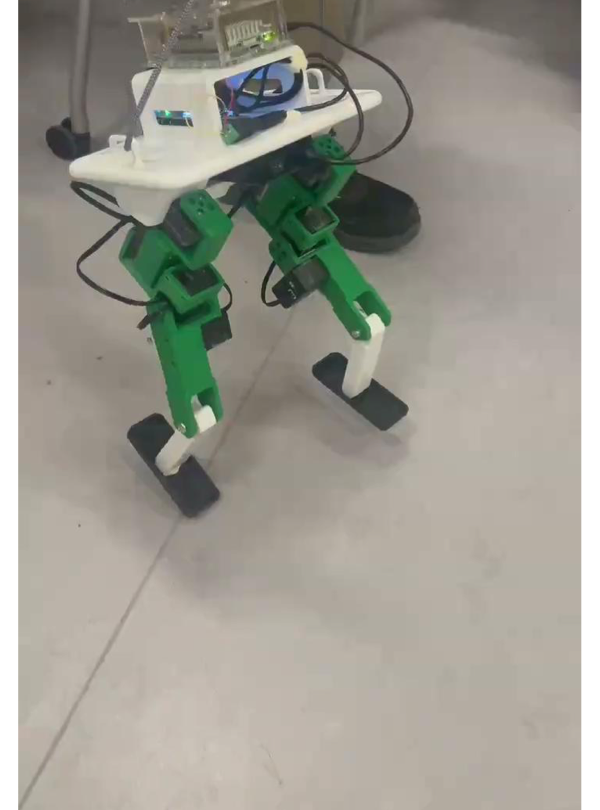 Behind the scenes: standing on the lab floor between gait-tuning runs.
Behind the scenes: standing on the lab floor between gait-tuning runs.
Failure & Iteration Log
Issues found during the single-leg build phase and how each was resolved:
| # | Issue | Fix |
|---|---|---|
| 1 | Hip mount broke under small shear-bending loads | Increased wall thickness on the mount |
| 2 | Foot was too tight to assemble with the bottom leg link | Loosened tolerance for a clean fit |
| 3 | Servo disk broke during testing from motion conflict with the linkage | Fine-tuned the joint’s motion range to remove the interference |
 Failures captured at the hardware: (1) the cracked cyan hip mount split along the print layers under shear; (2) the original foot wouldn’t seat onto the bottom leg link — mouse for scale; (3) the snapped servo disk in-situ after the linkage drove it past its mechanical limit.
Failures captured at the hardware: (1) the cracked cyan hip mount split along the print layers under shear; (2) the original foot wouldn’t seat onto the bottom leg link — mouse for scale; (3) the snapped servo disk in-situ after the linkage drove it past its mechanical limit.
Bipedal-stage iterations (post-assembly):
- TPU foot experiment. We replaced PLA feet with TPU (85A) hoping for better ground compliance. The flexibility expanded the gait search problem — the robot lost static balance and was harder to control — and we reverted to PLA.
- Power delivery upgrade. The original thin wiring between the DC converter and battery produced enough voltage drop to make servo behavior inconsistent. Replacing it with thicker-gauge cables stabilized the power rail and gait reliability immediately improved.
- Cable routing. Wiring tidied and bundled along the chassis so legs can swing without snagging.
Hardware Implementation
The robot is controlled by a Raspberry Pi running a periodic gait function. Servo commands go out directly over GPIO; encoder positions are read back to record waypoints during tuning. Power comes from an onboard battery via a DC converter.
Walking video: Jumbot-B taking baby steps
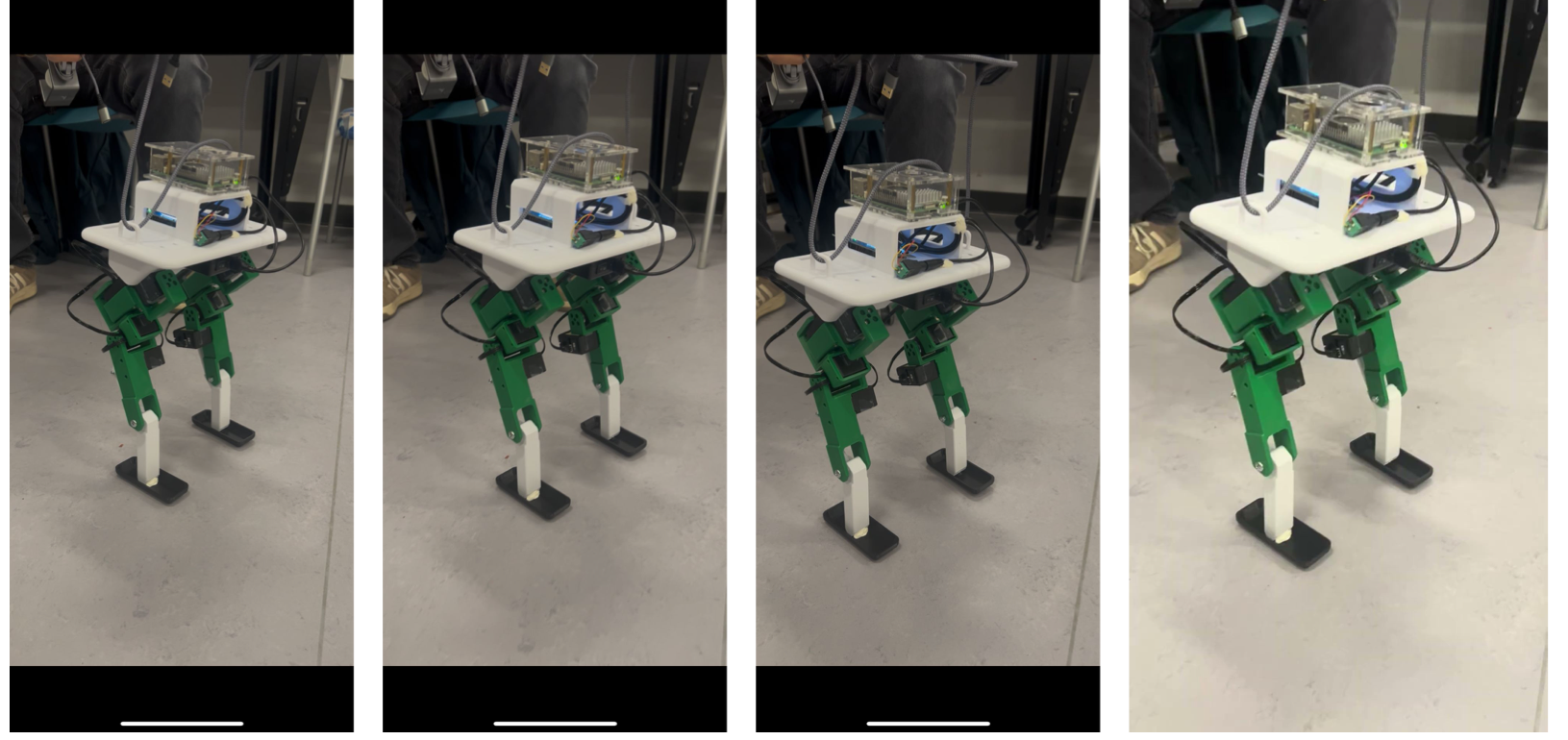 Frame sequence captured from the walking video — body shifts side-to-side as the swing leg clears the floor between consecutive support phases.
Frame sequence captured from the walking video — body shifts side-to-side as the swing leg clears the floor between consecutive support phases.
Hip Kinematics
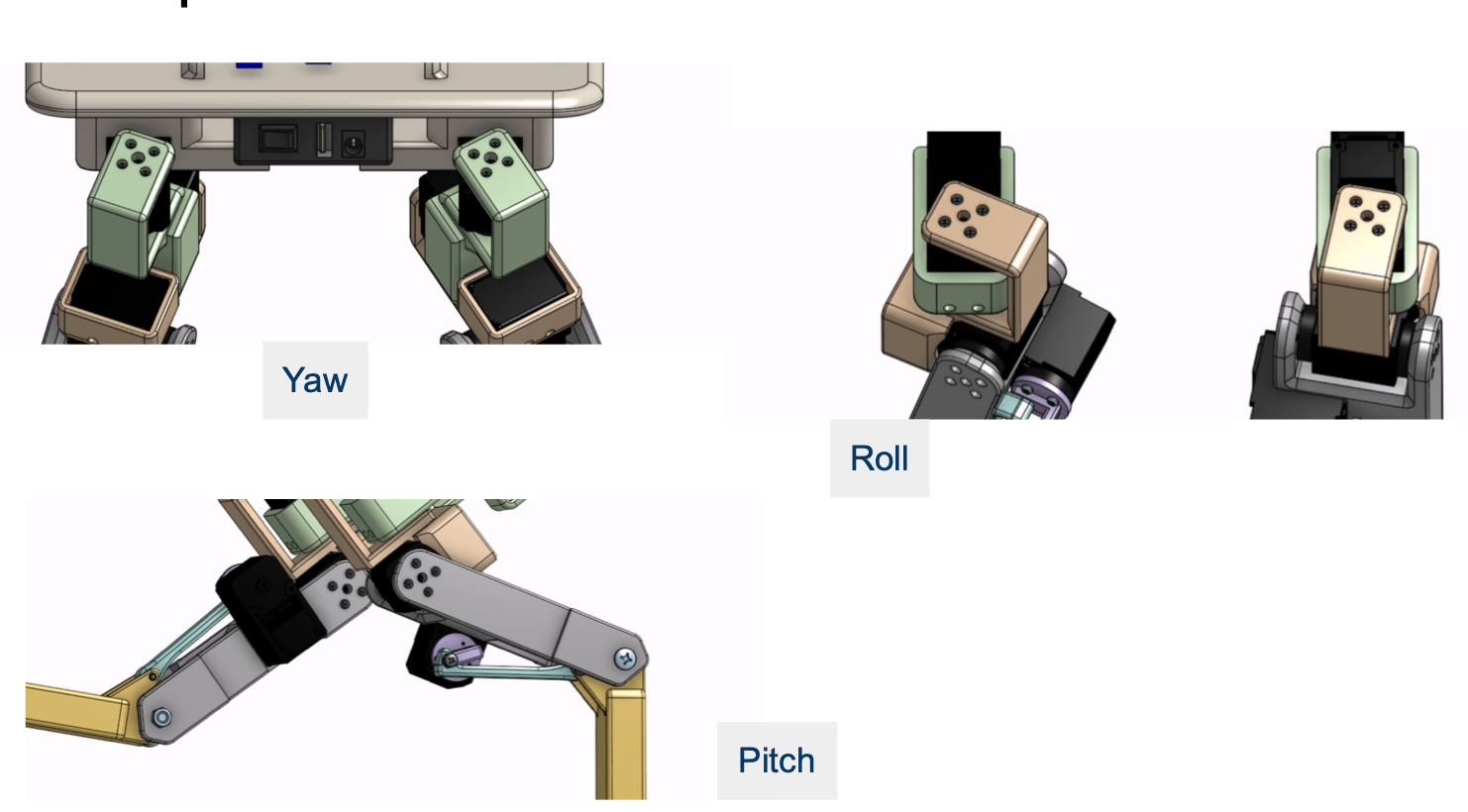 Three hip degrees of freedom — yaw, roll, and pitch — give Jumbot-B body-twisting capability for shifting weight during single-support phases of a gait.
Three hip degrees of freedom — yaw, roll, and pitch — give Jumbot-B body-twisting capability for shifting weight during single-support phases of a gait.
Knee Linkage
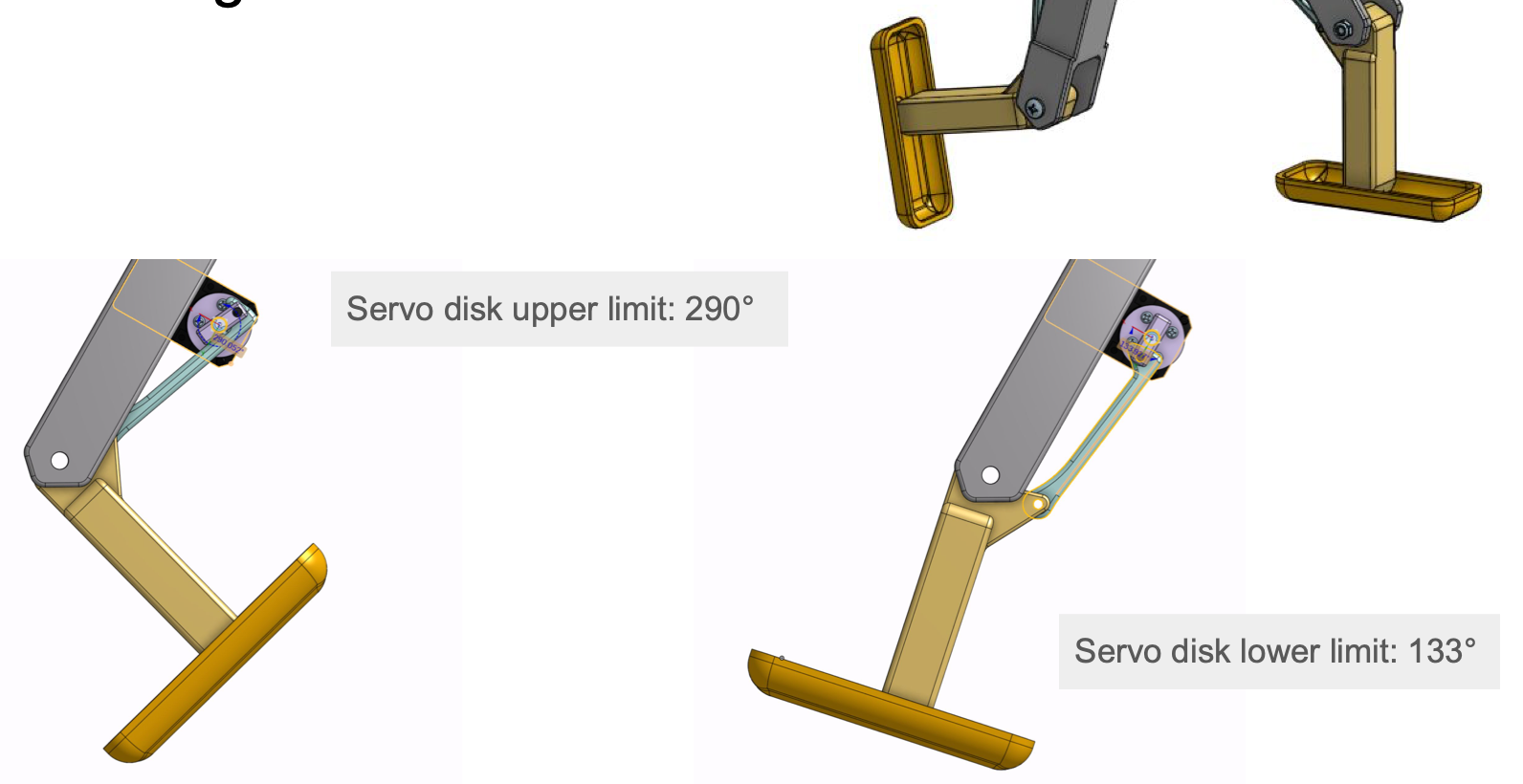 Four-bar knee linkage driven by the leg servo. Servo disk operating range: 133° (extended) to 290° (flexed). The mechanical limits were validated empirically by sweeping the servo through its full range and noting where the linkage starts to bind.
Four-bar knee linkage driven by the leg servo. Servo disk operating range: 133° (extended) to 290° (flexed). The mechanical limits were validated empirically by sweeping the servo through its full range and noting where the linkage starts to bind.
Servo Safety Limits
Per-joint position bounds, validated empirically by sweeping each servo through its full physical range and noting where the linkage starts to bind:
| Joint | Min (deg) | Max (deg) |
|---|---|---|
| Leg (knee) | 85 | 235 |
| Hip pitch | 95 | 190 |
| Hip yaw | 20 | 200 |
| Hip roll | 30 | 210 |
The gait controller clamps every servo command against these bounds so a misbehaving function can’t drive a servo into the chassis or fight the linkage.
Performance & Learning Curve
Speed measurements across iterations:
| Iteration | Speed (in/sec) | Speed (cm/sec) | Notes |
|---|---|---|---|
| Baby Steps — sustained max | 0.5 | 1.27 | First reliable walking gait |
| Baby Steps — fastest single cycle | 1.0 | 2.54 | 2 in/cycle, 2 sec/cycle |
| Final Performance | ~1.6 | 4.0 | After power-rail upgrade and gait re-tuning |
That’s roughly a 3.1× speedup from first walking gait to final, driven by hardware reliability fixes (thicker power wiring, cable management) and additional gait waypoint tuning.
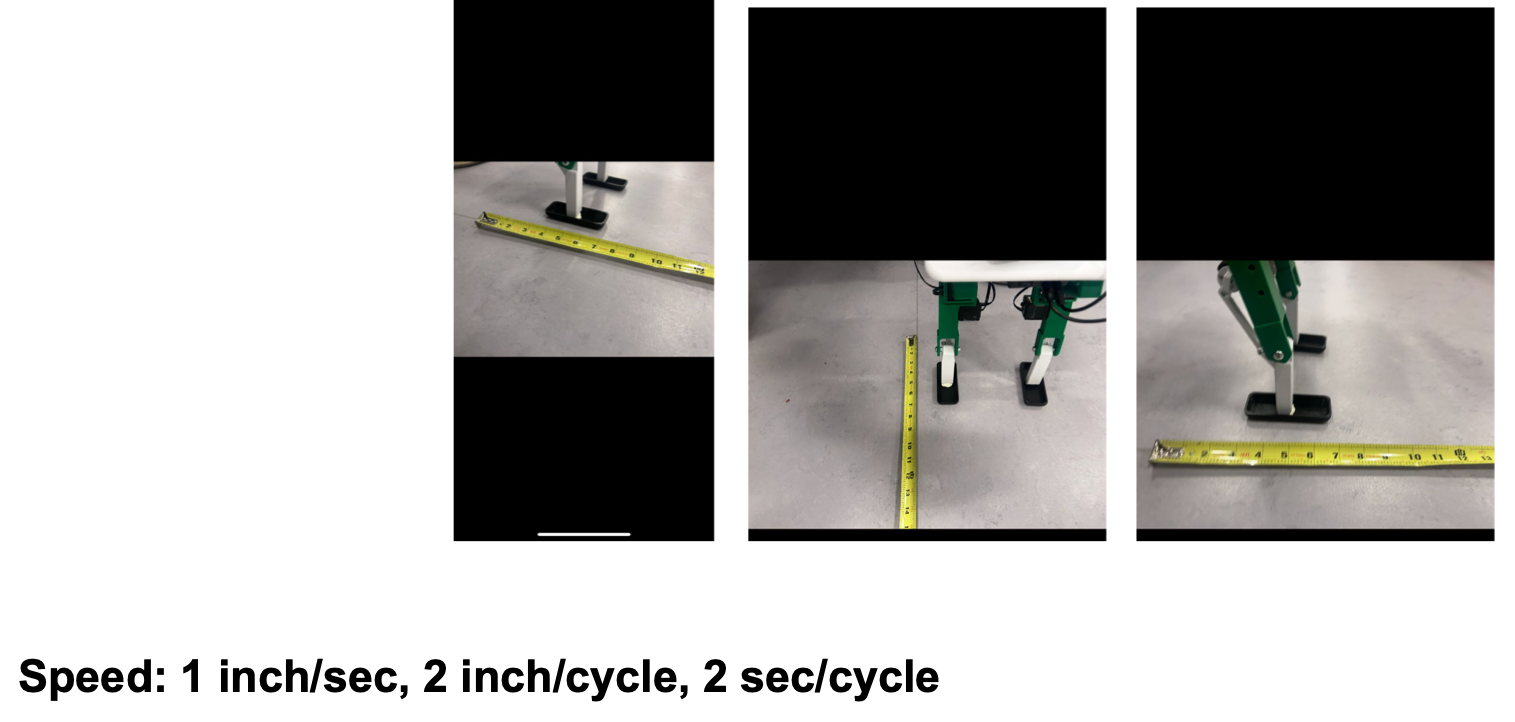 Speed measurement at the Baby Steps milestone — robot walking next to a tape measure: 1 in/sec at peak, 2 in/cycle, 2 sec/cycle.
Speed measurement at the Baby Steps milestone — robot walking next to a tape measure: 1 in/sec at peak, 2 in/cycle, 2 sec/cycle.
Gait Development
Our approach to gait generation:
- Manually pose the robot through one walking cycle, capturing joint angles at each transitional state via the servo encoders.
- Use those waypoints to construct a periodic function for the joint trajectories.
- Iterate by hand, adjusting timing and amplitude until the robot walks stably.
The hip yaw + roll axes give Jumbot-B more body-twisting capability — useful for shifting the center of mass during single-support phases — but they also widen the gait search space, which is the main reason gait tuning has been the slow part of the project. Once roughly half a walking cycle is dialed in, the other half tends to mirror it.
Motor Data
We log per-servo position, velocity, temperature, and bus voltage during a walking cycle. The figure below covers an 8-second window across all 8 servos (Hip Pitch 1/2, Hip Yaw 1/2, Hip Roll 1/2, Leg 1/2):
- Position (deg): sinusoidal trajectories with leg/hip-pitch joints traversing the largest range; the periodic structure is exactly what the gait function commands.
- Velocity (deg/s): derivative of position; peaks near ±90 deg/s for the swing-leg joints.
- Temperature (°C): servos warm steadily from ~30 °C to ~40 °C over the run — comfortably below the failure window.
- Bus voltage (mV): ~8400–8800 mV with the upgraded wiring; pre-upgrade dips that caused jitter are no longer present.
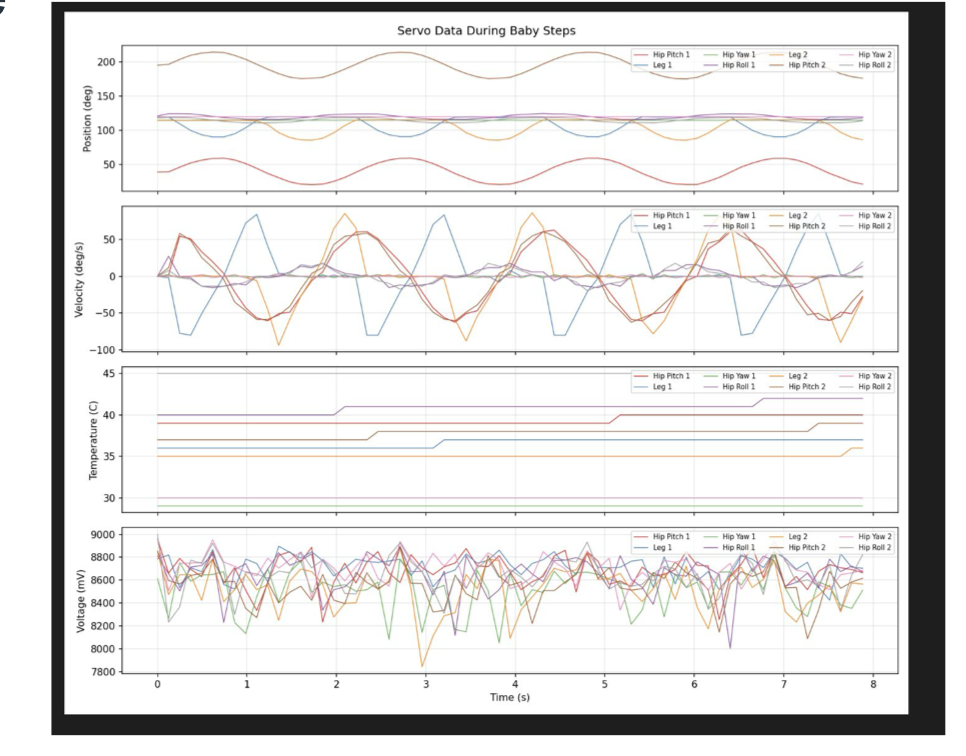 Servo data during the Baby Steps gait — 8 s of position, velocity, temperature, and bus voltage logged from all 8 servos.
Servo data during the Baby Steps gait — 8 s of position, velocity, temperature, and bus voltage logged from all 8 servos.
Energy Efficiency
Quick efficiency numbers derived from the spec sheet and best-speed measurement:
| Metric | Value | How |
|---|---|---|
| Peak power draw | 5.4 W | 9 V × 0.6 A (measured) |
| Energy per meter at top speed | ~135 J/m | 5.4 W ÷ 0.04 m/s |
| Cost of Transport (CoT) | ~2.0 | P / (m · g · v) = 5.4 / (6.8 · 9.81 · 0.04) |
Cost of Transport is the standard dimensionless efficiency metric for legged locomotion. Humans walking sit around CoT ≈ 0.2; research quadrupeds like ANYmal land in the 1–3 range. Jumbot-B’s ~2.0 is in the right ballpark for a small experimental biped, though there’s clear room to optimize — most of the 5.4 W is going to support-leg holding torque, not forward motion.
Robot Reliability Routines
- Boot health check. Queries each servo for position, temperature, and bus voltage; aborts startup if any servo fails to respond or reports out-of-range temperature.
- Homing routine. Drives all 8 servos to a known stand-up pose via
safe_move, which clamps every commanded angle to the per-servo bounds before issuing the move. Used at startup and as a recovery pose between gait runs. - Servo-disconnect catch. The main control loop wraps servo commands in a
try/exceptforServoTimeoutError. If a motor disconnects or times out mid-gait, the loop logs a critical error and exits cleanly rather than charging on with a dead actuator. - Shutdown routine. Detorques servos, returns the robot to the home pose, then powers down — prevents the robot from collapsing under its own weight when killed mid-run.
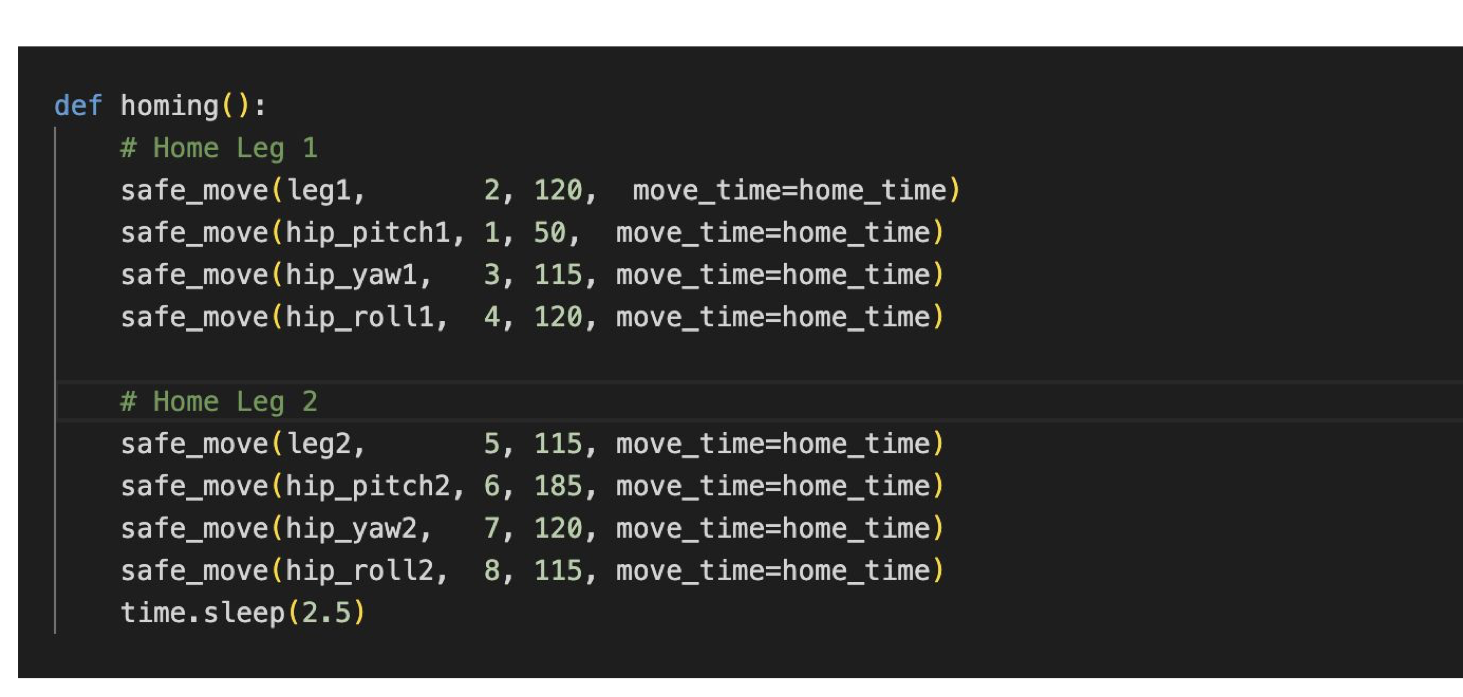 The
The homing() function: each leg’s four servos move to their home angle through a clamped safe_move wrapper, then a 2.5 s settle pause.
except ServoTimeoutError:
print("\nCRITICAL ERROR: A motor disconnected or timed out!")
print("Initiating emergency stop...")
break
Lessons Learned
- Material choice has hidden second-order effects. TPU feet looked good on paper for compliance, but the flexibility blew up the gait problem and broke static balance.
- Power delivery is invisible until it isn’t. Thin wires produced enough voltage drop to make servo behavior inconsistent — symptoms looked like control bugs but were really hardware. Thick cables fixed it.
- Sim-to-real has a fixed setup cost. When that cost is high relative to the iteration budget — as it was once Onshape URDF export proved unreliable — tuning directly on hardware can dominate.
- Encoder-driven manual gaits work. The waypoint-based periodic function is crude but converges quickly once you find the first half of the cycle.
- Build quality before control quality. Three early single-leg failures (hip-mount cracking under shear, tight foot tolerances, servo-disk breakage from motion conflict) all came from CAD/print/assembly mismatches. Fixing each at the source — wall thickness, tolerance, motion-range checks — was much cheaper than working around them in software.
Future Work
- Refine the walking gait beyond the current 4 cm/sec.
- Land the Onshape → URDF pipeline so we can prototype gaits in MuJoCo before committing to hardware.
- Add new locomotion modes: turning, uneven terrain, jumping.
- Sweep a full power-vs-velocity efficiency curve to find the CoT-minimizing gait.
Bill of Materials
3D-printed structural parts (PLA except where noted) plus off-the-shelf hardware and electronics:
| # | Part | Qty | Source / Material |
|---|---|---|---|
| 1 | yallRoll_mount | 2 | 3D printed, PLA |
| 2 | rollPitch_mount | 2 | 3D printed, PLA |
| 3 | upper_left | 1 | 3D printed, PLA |
| 4 | upper_right | 1 | 3D printed, PLA |
| 5 | Leg_bottom | 2 | 3D printed, PLA |
| 6 | linkage_servo | 2 | 3D printed, PLA |
| 7 | knee_linkage | 2 | 3D printed, PLA |
| 8 | foot | 2 | 3D printed, PLA (TPU experiment reverted — see iteration log) |
| 9 | hip_mount | 1 | 3D printed, PLA |
| 10 | M5 pan-head Phillips screw | 2 | McMaster-Carr 92000A338 |
| 11 | M3 pan-head Phillips screw | 4 | McMaster-Carr 92000A128 |
| 12 | Phillips rounded-head thread-forming screw | 72 | McMaster-Carr 99461A921 |
| 13 | 8 mm OD dry-running nylon sleeve bearing | 4 | McMaster-Carr 6389K466 |
| 14 | M3 thin-profile hex nut | 4 | McMaster-Carr 90695A033 |
| 15 | M5 thin-profile nylon-insert locknut | 2 | McMaster-Carr 90453A113 |
| 16 | M5 thin-profile hex nut | 2 | McMaster-Carr 90695A037 |
| 17 | LX-16A bus servo motor | 8 | actuator |
| 18 | IMU | 1 | onboard sensor |
| 19 | Raspberry Pi 4 | 1 | compute |
| 20 | Servo bus controller | 1 | servo bus |
| 21 | DC converter | 1 | power |
| 22 | Battery | 1 | power |
| 23 | Wires & cables | — | wiring |
Code Repository
github.com/ChrisLiang33/jumbotB
Citations
[1] Sun, B., Mohamed Haris, S., & Ramli, R. (2026). A Systematic Review of Deep Reinforcement Learning for Legged Robot Locomotion. Instruments, 10(1), 8. https://www.mdpi.com/2410-390X/10/1/8
Acknowledgements
Built for ME 134 — Robotics Studio, Spring 2026 at Tufts University. Thanks to the course staff for the platform and feedback throughout the term.
Project by Zhenkai Gao and Xianmai (Chris) Liang.